|
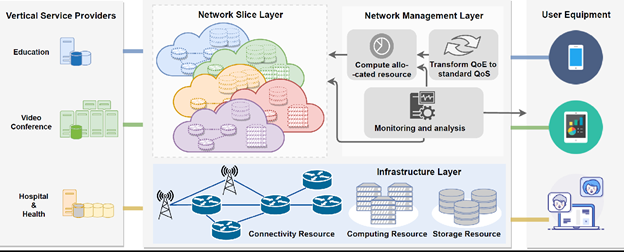
The digital transformations of the enterprises require network services catered for different applications with specific performance requirements. 5G networks and network slicing make it possible to provide a customized and performance-guaranteed private network for enterprises. To provide such services to a large-scale of enterprises, a network slicing management platform where enterprises can flexibly configure and request network resources on demand with customized quality of experience requirement is urgently needed.
Under the current practice of network slicing offering, the enterprises need to clearly know they want (in terms of network resources) in order to satisfy their own traffic demands. Internet service providers (ISPs) then configure network resources accordingly. In other words, enterprises pay per request and get what they want (in terms of network resources). The dilemma is that quite often enterprises only know what they want (in terms of performance) and have zero knowledge about how much network resources can achieve what they want. Such a gap between enterprises and ISPs hinders the wide adoption of network slicing.
To fill the gap between ISP and enterprises, it's crucial to establish the linkage between quality of experience from users and the quality of service offered by the network, and the linkage between the quality of service provided by the network and the corresponding amount of network resources. In this project, we plan to design a network slicing management platform, where enterprises can request network resources on demand with customized quality of experience requirements.
|
|
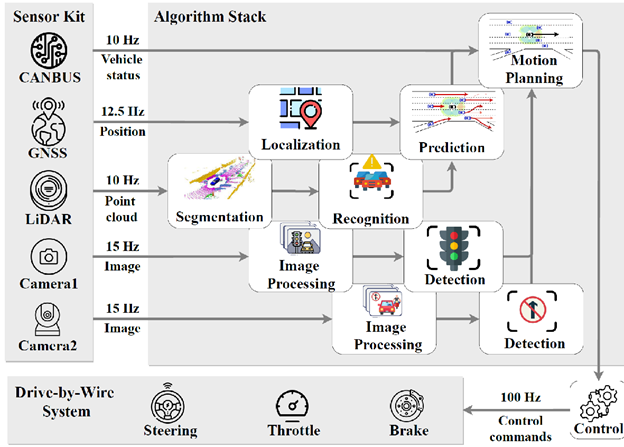
An autonomous driving system consists of many inter-dependent software components to perform various tasks such as perception, motion planning, and control. In recent years, various models and algorithms have been developed for individual tasks to achieve shorter execution time and higher accuracy. When such tasks are put into a pipeline, driving safety depends on not only the performance of individual tasks, but also how they are scheduled on multi-core processors.
Driving safety requires that 1) driving decisions are made according to the latest surroundings, and 2) sensing data stays synchronized in the pipeline to avoid making driving decisions based on distorted surroundings. In this project, we introduce two new performance metrics, namely, age of information (AoI) and time disparity, to capture the requirements of autonomous driving. AoI is defined as the time difference between the time when the control task generates control commands and the minimum raw data timestamp of the control task’s inputs. Our preliminary results have shown that minimizing the maximum AoI is equivalent to jointly maximizing the throughput and minimizing the responsive time, where throughput and responsive time are often separately considered in conventional task scheduling. For a task with multiple inputs, time disparity is defined as the maximum time difference of the raw data timestamps among its inputs.
In this project, we aim to develop an AoI-centric task scheduling framework for autonomous driving, which takes the impact of time disparity on driving safety and tasks' execution time dynamics into consideration. In particular, we will use Apollo CyberRT as our simulator. We will develop learning models to dynamically predict tasks’ execution time according to the surroundings. We will also develop learning models to study the impact of time disparity on driving safety, i.e., to empirically derive the threshold where time disparity above that will cause serious driving safety issues. Given the predicted execution time of tasks, a rolling horizon based task scheduling will be developed to minimize the maximum AoI while ensuring that time disparity is less than the derived threshold. We will then use the solutions obtained to train a deep reinforcement learning model offline so that real-time task scheduling decisions can be made through fast and accurate online inference.
In summary, this project will open a new landscape for task scheduling. We expect the proposed AoI-centric task scheduling framework will make contributions not only to autonomous driving, but also other applications demanding data freshness and synchronization.
An autonomous driving system consists of many inter-dependent software components to perform various tasks such as perception, motion planning, and control. In recent years, various models and algorithms have been developed for individual tasks to achieve shorter execution time and higher accuracy. When such tasks are put into a pipeline, driving safety depends on not only the performance of individual tasks, but also how they are scheduled on multi-core processors.
Driving safety requires that 1) driving decisions are made according to the latest surroundings, and 2) sensing data stays synchronized in the pipeline to avoid making driving decisions based on distorted surroundings. In this project, we introduce two new performance metrics, namely, age of information (AoI) and time disparity, to capture the requirements of autonomous driving. AoI is defined as the time difference between the time when the control task generates control commands and the minimum raw data timestamp of the control task’s inputs. Our preliminary results have shown that minimizing the maximum AoI is equivalent to jointly maximizing the throughput and minimizing the responsive time, where throughput and responsive time are often separately considered in conventional task scheduling. For a task with multiple inputs, time disparity is defined as the maximum time difference of the raw data timestamps among its inputs.
In this project, we aim to develop an AoI-centric task scheduling framework for autonomous driving, which takes the impact of time disparity on driving safety and tasks' execution time dynamics into consideration. In particular, we will use Apollo CyberRT as our simulator. We will develop learning models to dynamically predict tasks’ execution time according to the surroundings. We will also develop learning models to study the impact of time disparity on driving safety, i.e., to empirically derive the threshold where time disparity above that will cause serious driving safety issues. Given the predicted execution time of tasks, a rolling horizon based task scheduling will be developed to minimize the maximum AoI while ensuring that time disparity is less than the derived threshold. We will then use the solutions obtained to train a deep reinforcement learning model offline so that real-time task scheduling decisions can be made through fast and accurate online inference.
In summary, this project will open a new landscape for task scheduling. We expect the proposed AoI-centric task scheduling framework will make contributions not only to autonomous driving, but also other applications demanding data freshness and synchronization.
|